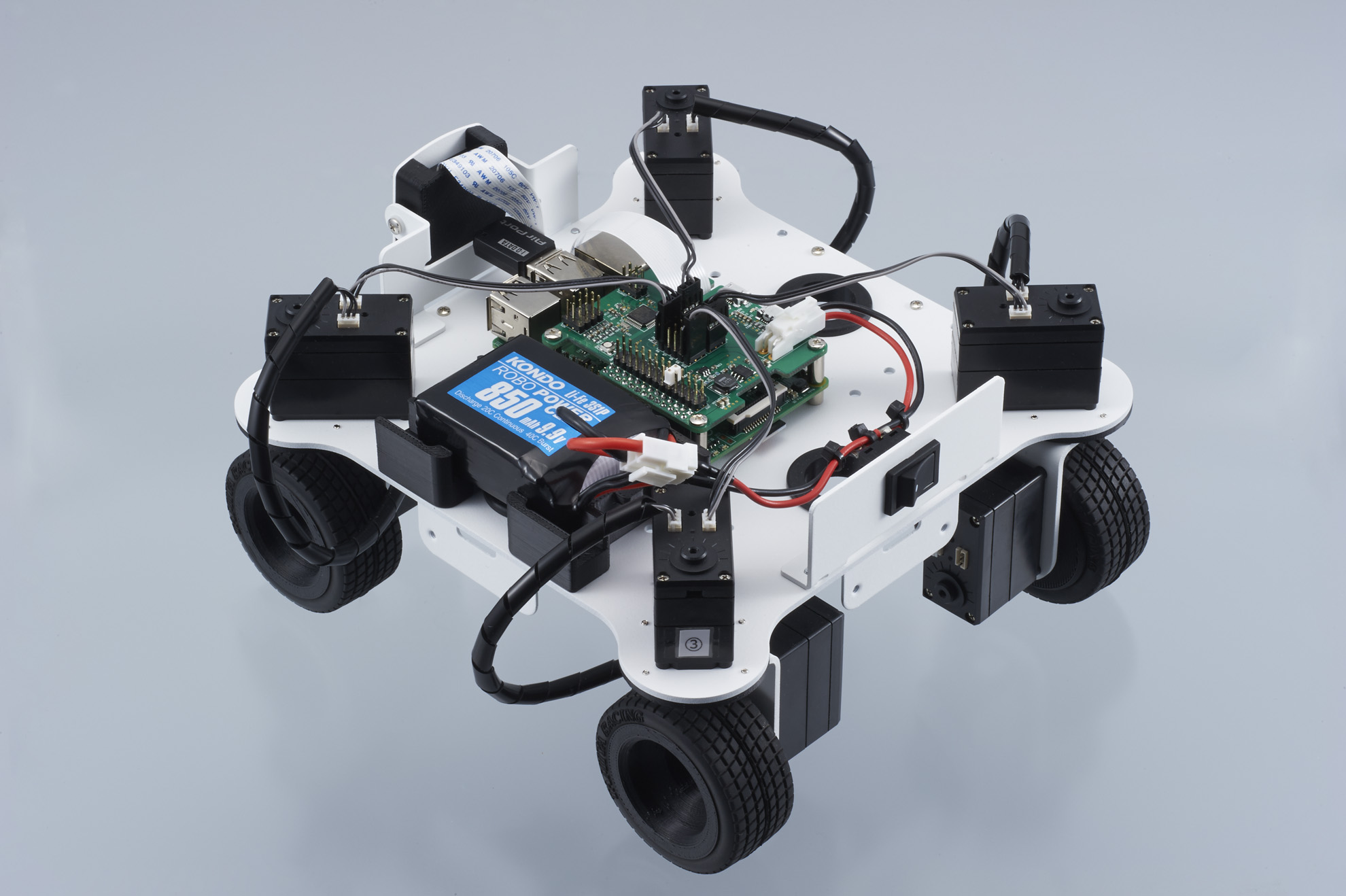
EXOS ROVER 2016-10-24 By exos_webmaster 0 Comments 概要 EXOSローバーは4輪独立のできる車両型ロボットです。コントローラーはEXOSタートルと同じ仕組みで簡単操作。4輪独立駆動による、超進地旋回や並行移動など多彩な動きができるので、自律タイプ制御プログラムのしがいのあるロボットキットです。 速度調整・向きは4輪で完全に独立して調整できます。標準ではETCBに駆動プログラムがインストールされていて、Raspberry Piはブラウザからの操縦命令の受信とカメラ画像の送信を行います。 ※開発中